3D Vision¶
3D Representations¶
surface/boundary representations:
Depth Maps¶
representing the visible without 3D structure - 2.5D
Point Clouds¶
Triangular Meshes¶
三个点组成的三角形叫face,表示了point cloud之间点的关系
可以计算ray-triangle intersections
可能有歧义(向内还是向外)
改变点的位置可以改变物品的shape,但是有些改变涉及到的数据会比较多,也比较复杂
Parametric Surfaces¶
例如:
提供了二维平面坐标到三维坐标的映射
问题就是如何找到一个global structure去表示形状外的点
rendering也比较困难,因为对于\(f\)而言很难应用到ray-triangle intersections
volume representations:
Voxelized 3D¶
将三维空间分割成小立方体(体素),每个体素代表三维空间中的一个固定体积,类似于二维图像中的像素。通过这种方式,可以用体素来描述和表示复杂的三维形状和结构。
相比mesh(只是表示表面),这种方式需要更多数量的体素去达到一个比较好的表示效果。
Implicit Surfaces¶
一般的式子为\(F(x,y,z) = 0\)
物品外部为正,内部为负
对于这种表达方式,Boolean operations are easy。
- 识别交点和交线:
- 计算两个几何体之间的交点和交线。这通常涉及几何体的边与面的相交检测。
- 对于多边形网格,这可能需要遍历所有面和边,使用射线投射或其他几何算法来检测交点。
- 分割几何体:
- 使用交点和交线将原始几何体分割成多个部分。每个部分代表几何体的一部分,这些部分可以是面片、体素或其他几何元素。
- 确保分割后的几何体仍然保持正确的拓扑结构。
- 选择保留部分:
- 根据所选的布尔操作类型(并集、交集或差集),确定哪些部分需要保留。
- 并集:保留两个几何体的所有部分。
- 交集:仅保留两个几何体的重叠部分。
- 差集:保留一个几何体的部分,同时去除与另一个几何体重叠的部分。
- 合并几何体:
- 将保留的部分合并成一个新的几何体。这可能需要重新生成网格或曲面。
- 确保合并后的几何体是封闭的,并且没有自相交的部分。
- 修复拓扑结构:
- 检查并修复任何拓扑错误,如重复顶点、边或面。
- 确保所有的法线方向一致,并且几何体的表面是光滑的。
- 优化和简化:
- 进行必要的优化步骤,如去除冗余的几何元素、简化网格和提高计算效率。
- 可能需要使用网格简化算法来减少多边形数量,同时保持几何体的形状和细节。
能够自然地描述复杂的形状和拓扑结构。
Signed Distance Function¶
对于空间中的一个点,SDF返回该点到最近的表面的距离
这都是建立在solid shape的基础上的,不支持包含烟雾、液体的表达
对于烟雾来说,识别一个点在物体里面外面没有意义,可以使用一个点的密度去表达这个shape
Image Formation¶
我们需要解决的问题是如何通过Surface-based 3D形成image
我们需要解决:
- Geometry - 一个3Dpoint在image的哪个点
- Physics - 这个点成像结果是什么样的
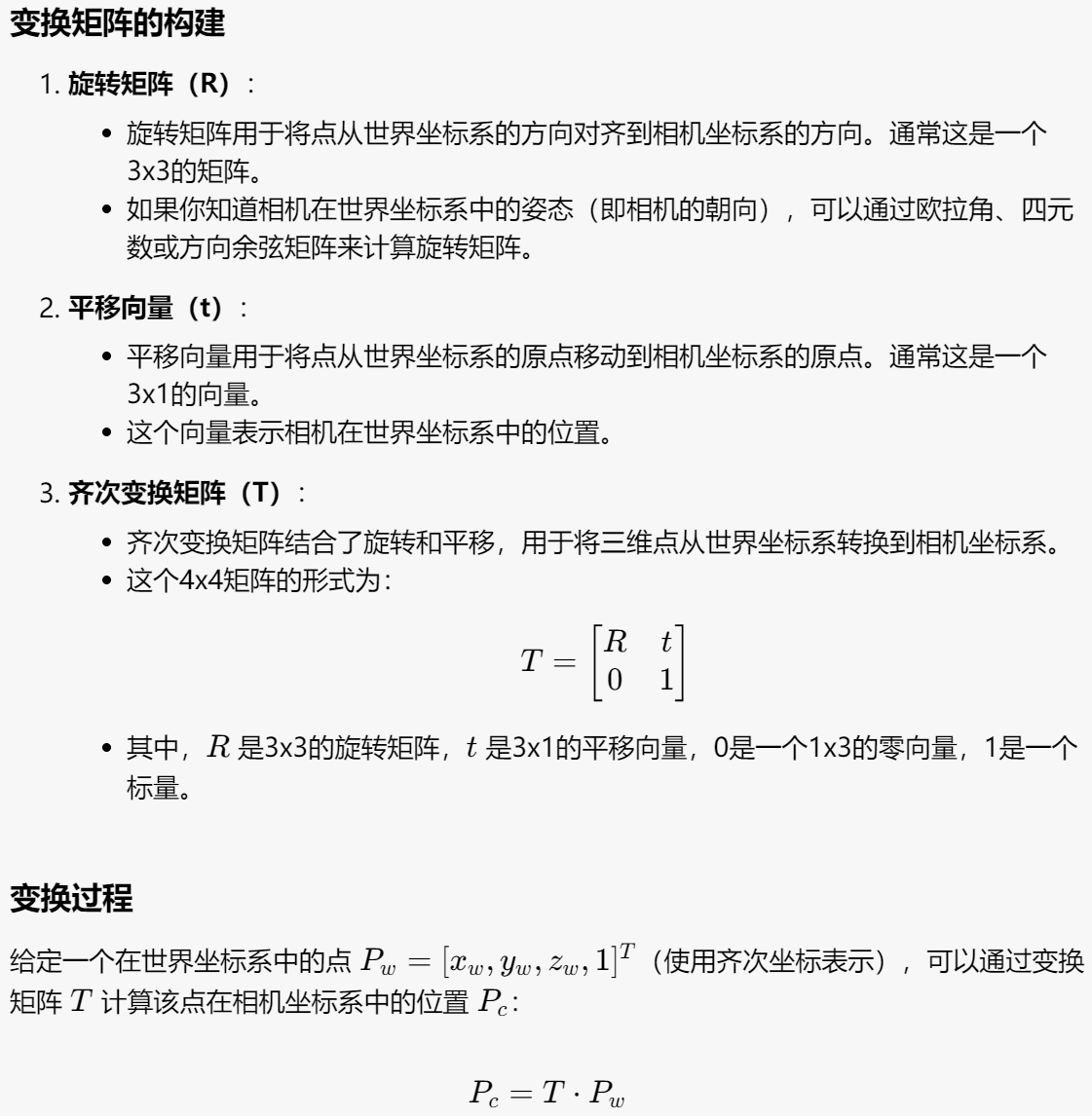
Geometry¶
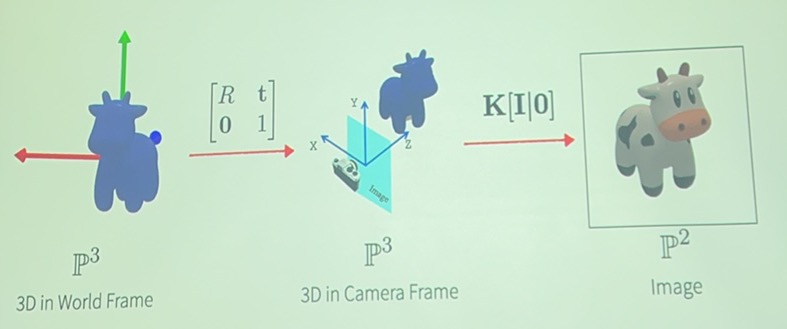
从世界坐标系(World Frame)到相机坐标系(Camera Frame)的变换:
相机坐标系映射到image:
在一般情况下一个点会接收来自四面八方的光,没有办法成像,所以我们引入了pinhole camera
从数学原理上讲,我们需要pinhole projection model完成3D形状到2D image位置的映射
在我们默认\(f = 1\)的情况下,映射关系为\((X,Y,Z)\to(\frac{X}{Z}, \frac{Y}{Z})\)
但是我们没有办法直接通过上述式子写出矩阵形式,需要增加一个维度实现(具体公式见prelearning)
当pinhole位置不等于image原点的时候我们对变换矩阵要作一定的改变即可实现。
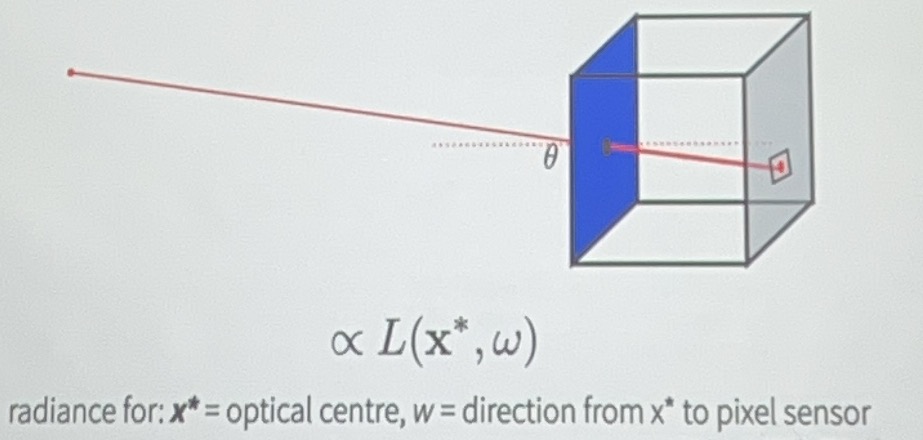
Physics¶
radiance: energy along a ray, 可以通过公式计算出一条ray射到一个point上面的energy
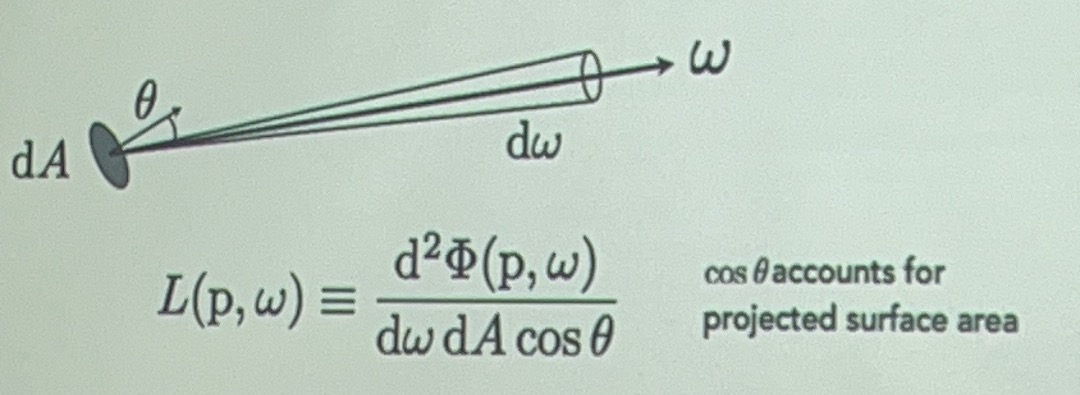
根据当前点接收到的ray energy强度以及点上的material可以计算image pixel上面的appearance

\((\omega·n)\)是直射和偏射的区别(同样一条射线直射能量高,偏射能量低)
3D from Multi-view¶
是通过不同视角的照片重建3D模型的过程。
理论上两个视角就可以重建,但是这非常困难,增加相机数量会重建得更加准确。
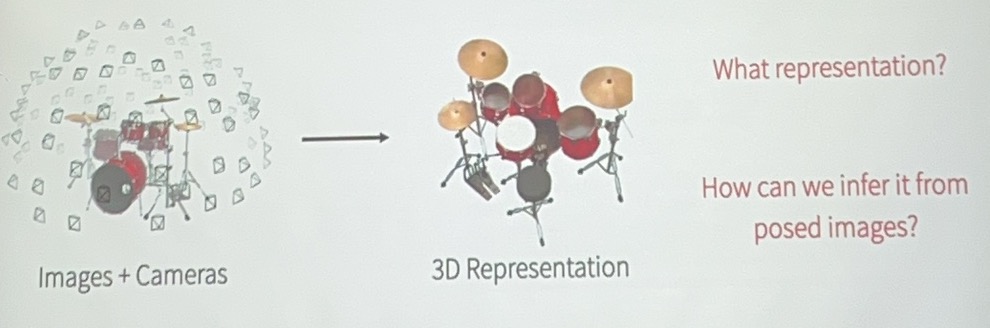
我们要关注的不仅仅是重建出的3D信息,更要关注如何渲染这个3d representation进而如何很好地传递信息。
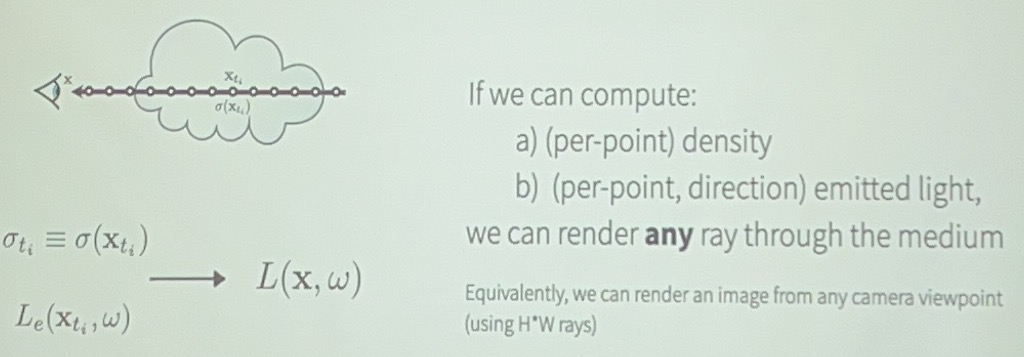
(Neural/Grid-based) Density Fields¶
密度场:3D点到该点密度的映射
关键问题就是如何渲染密度场,在渲染后的图像中每一个像素表示什么、如何来的?
但是这个方法不适用于流动的物品,例如雾、云、液体等
我们需要知道光线(的能量等)在这个介质中发生了什么变化
- absorption,光线的部分能量丢失
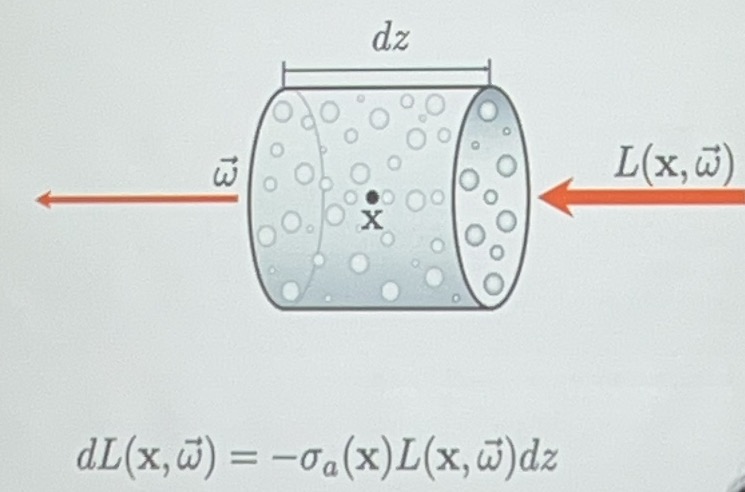
左边是absorption系数(和介质有关),中间是原始的光线能量(原本光线能量越强,吸收越多),对介质厚度积分
- emission - 部分介质自己会发射光线,例如火焰
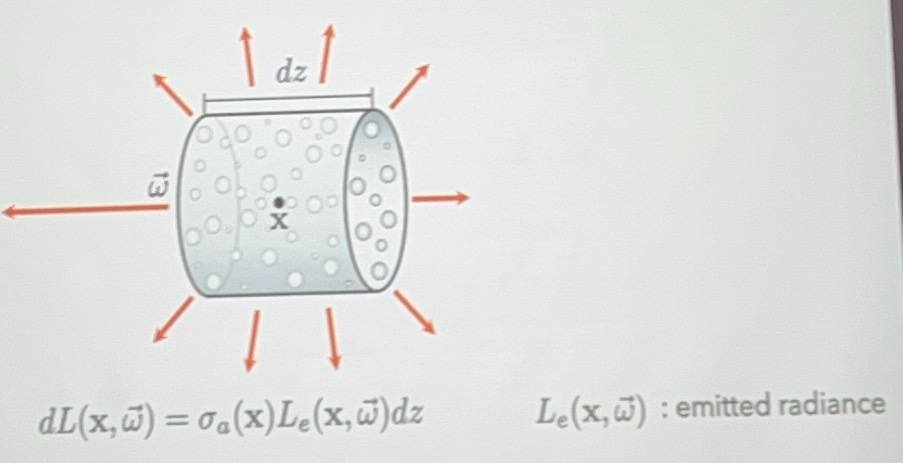
会增加光线的能量
-
scattering - 一部分是折射出去的,一部分是折射进来的
-
out-scattering
- in-scattering
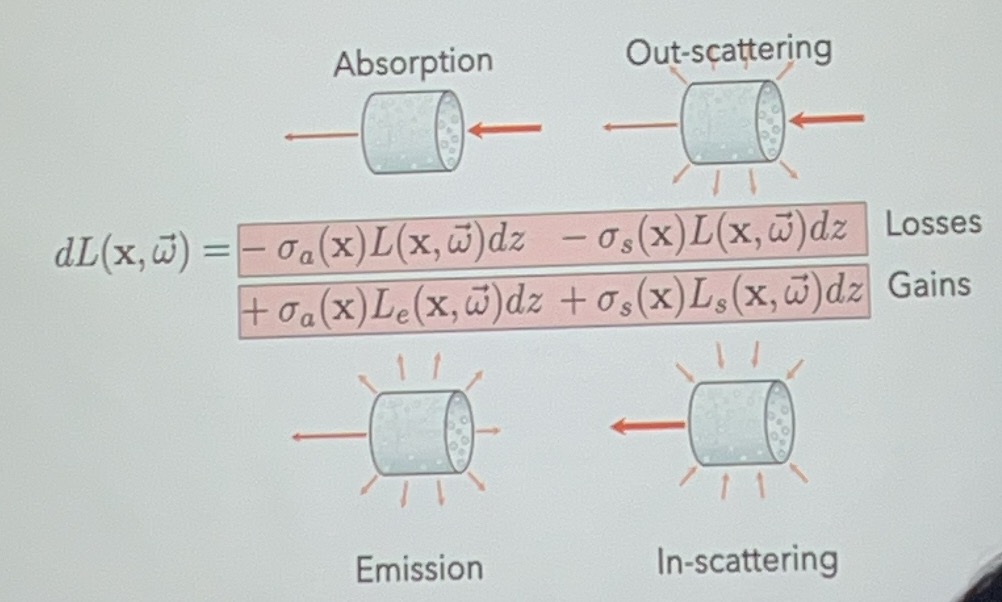
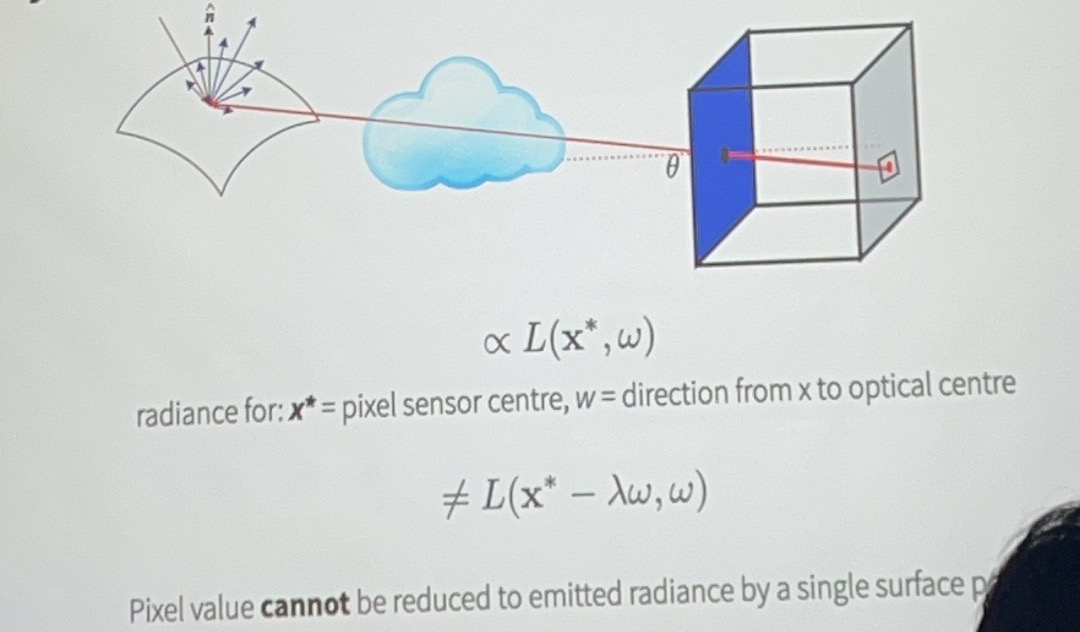
注意上面公式的\(L_e\)和\(L_s\),不等同于\(L\),所以不完全和入射光是线性关系。
但是这个计算成本很高。
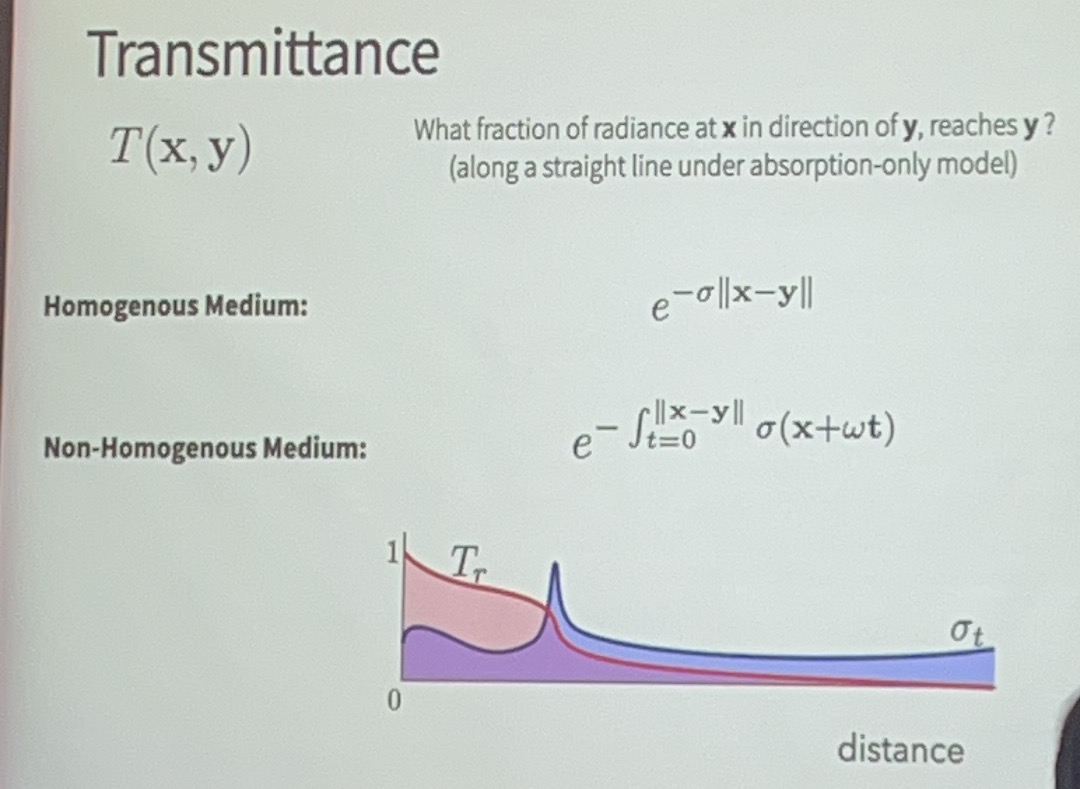
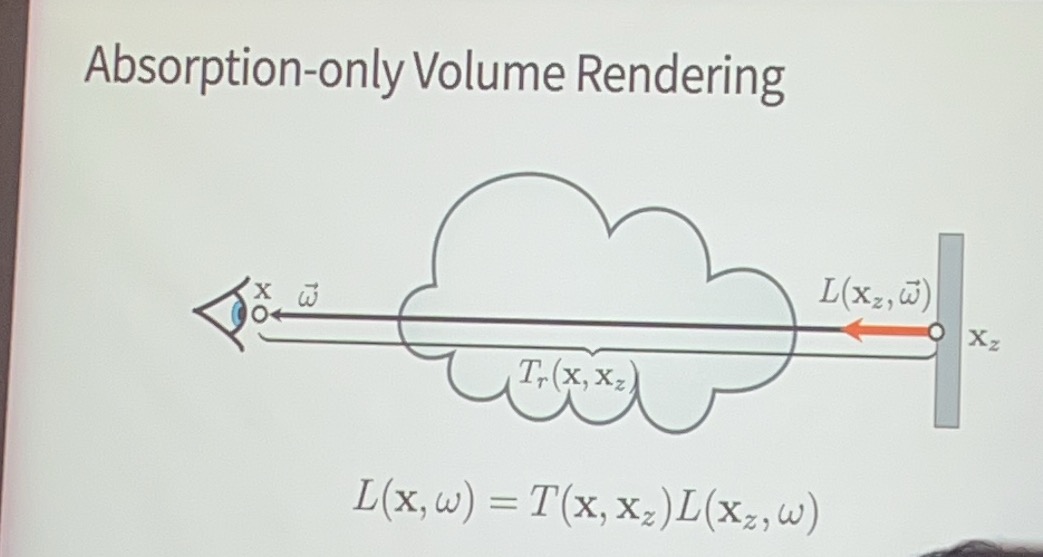
考虑只有吸收的情况: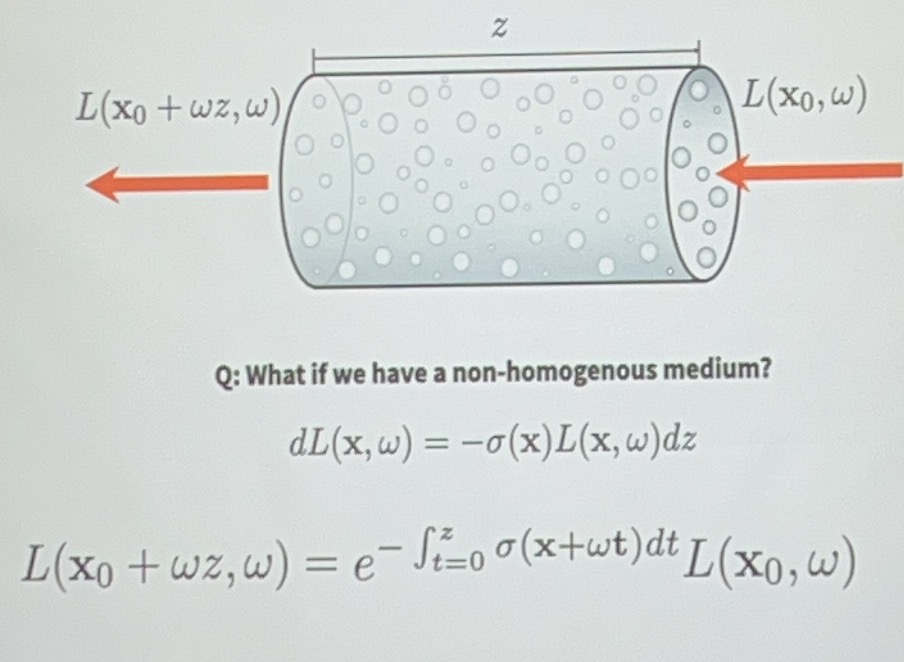
左边的系数被称为透光率\(T\)
加上emission之后: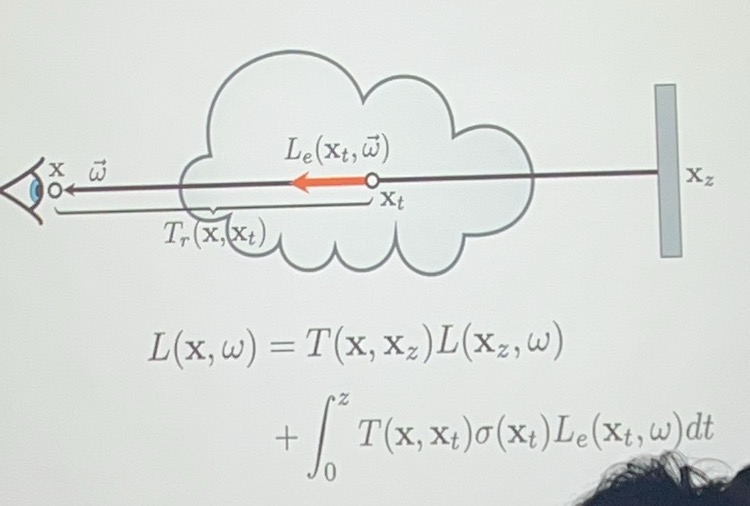
对于均匀质地介质的特殊情况: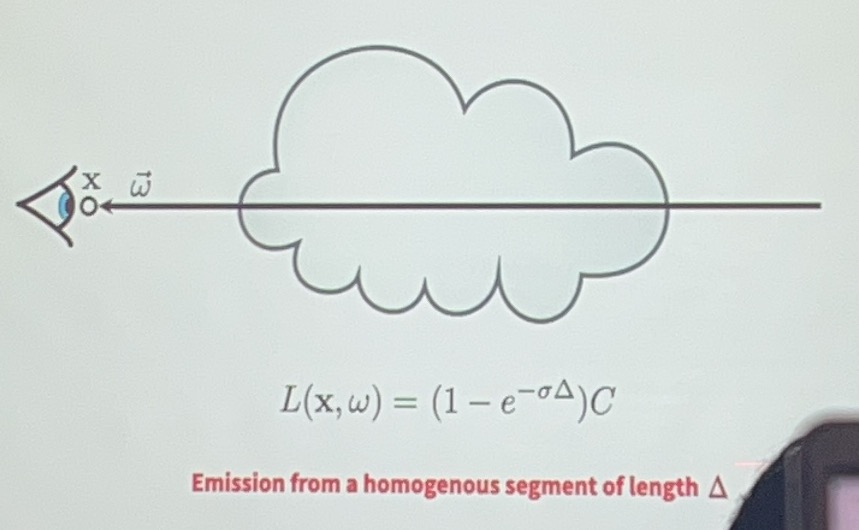
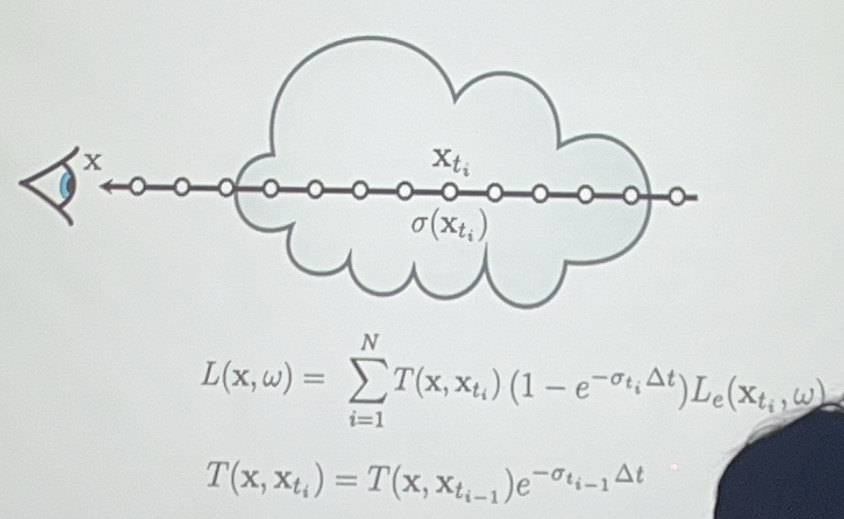
问题之一就是计算机不会算积分,我们可以取很多个离散点然后用点的能量近似点周围一段的能量。
有了渲染算法后我们如何进行3D representation?
-
可以考虑grid representation,并且为了更好地表示,我们可以定义一个非二进制的密度。
-
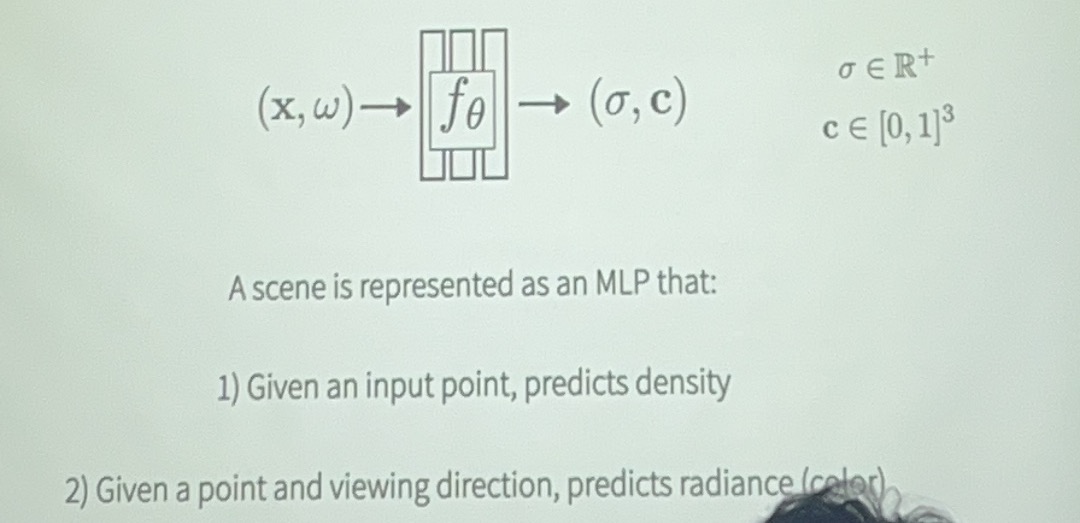
机器学习模型
一般情况下渲染出来会比较模糊,使用position encoding可以更好地表示high frequency encoding
NeRF:
- 输入:三维空间中的一个点的坐标和视角方向。
- 输出:该点的颜色(RGB)和密度。
- 训练:通过大量的视角图像对神经网络进行训练,使其能够准确地预测场景的辐射场。
Rendering Primitives(e.g. Gaussians)- 基于图元的渲染¶
- draw samples along the way - wasteful - we know where the samples are
改进:find primitives that affect the ray
- aggregate their contributions to render
Mesh Rendering¶
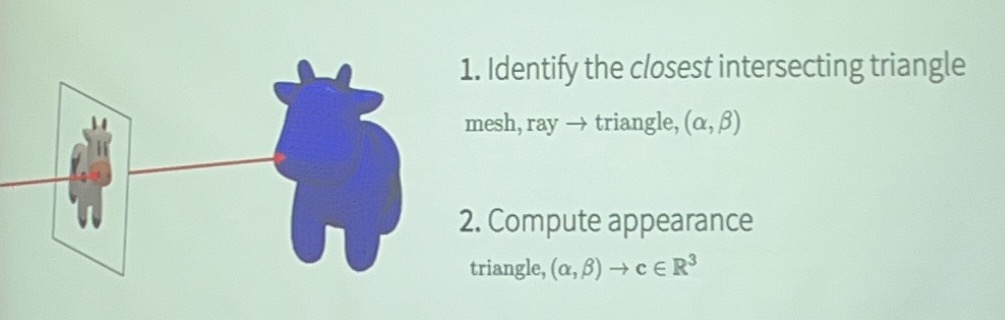
我们可以通过一些方式使得渲染出来的可微:
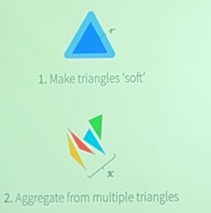
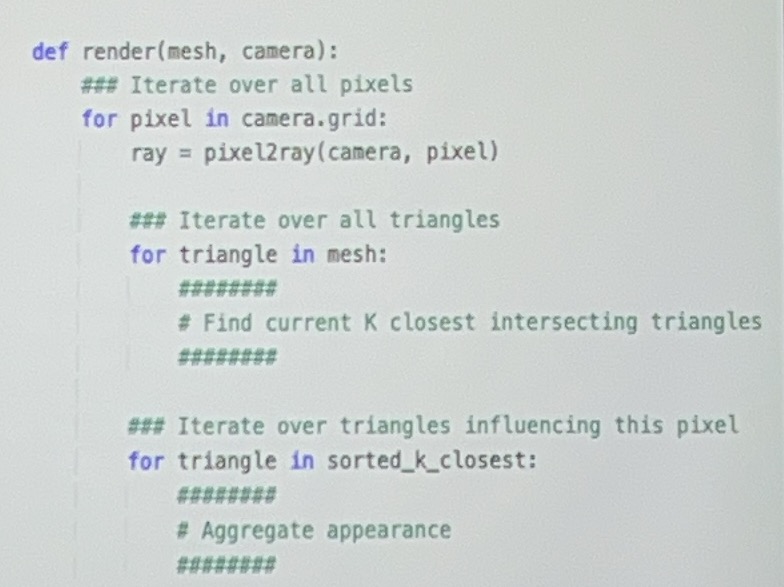
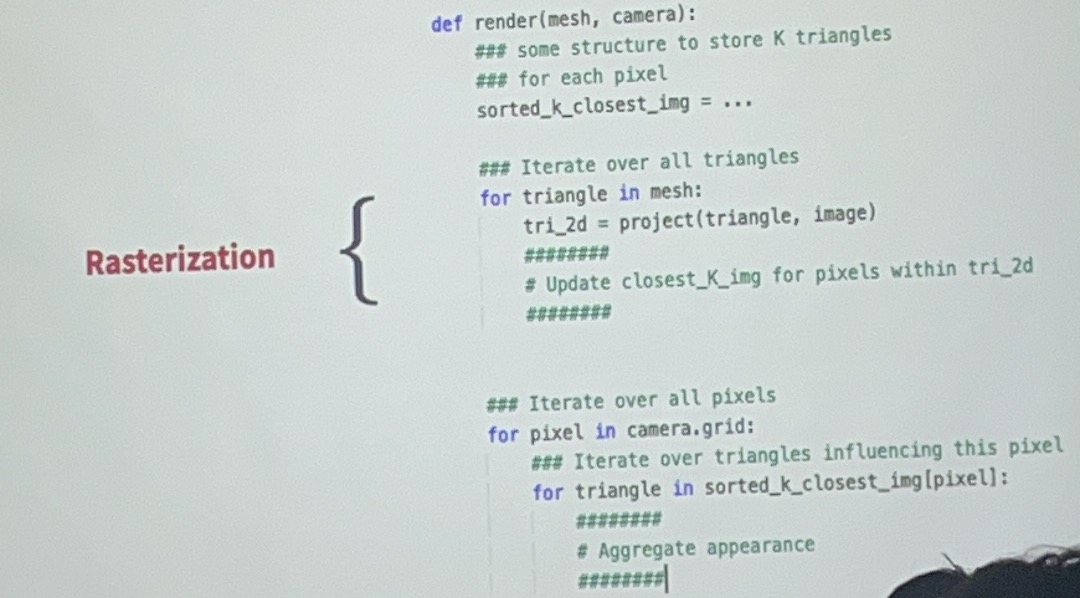
但是这个计算方式会造成冗余,我们对一个三角形会产生多次计算。优化如下:(先对每个三角形做迭代再对每个像素做迭代)
-
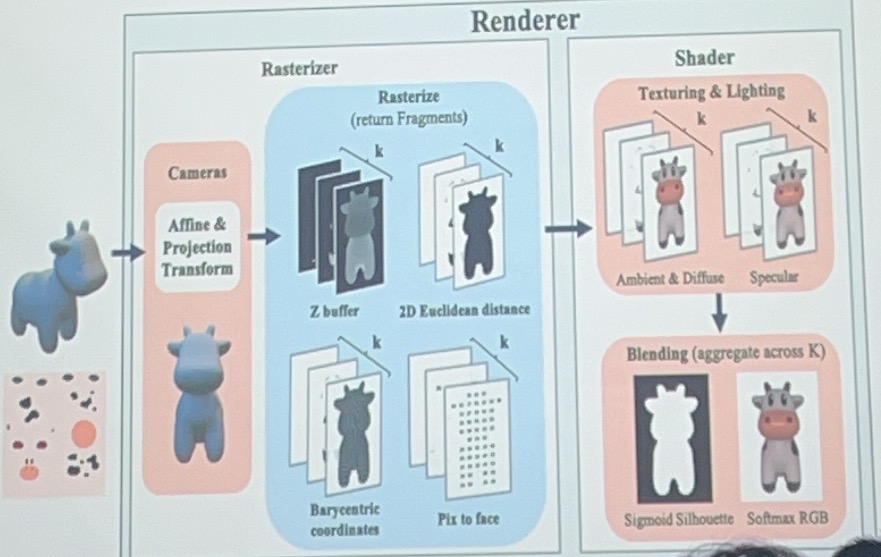
光栅化器(Rasterizer):
-
Affine & Projection Transform:将三维模型通过相机进行仿射和投影变换,转换为二维视图。
-
Rasterize (return Fragments):将三维模型分解成多个片段(fragments),包括:
- Z buffer:用于深度测试,确定像素的可见性。
- 2D Euclidean distance:计算每个片段到相机的二维欧几里得距离。
- Barycentric coordinates:计算每个片段在三角形内的重心坐标。
- Pix to face:将像素映射到对应的面。
-
-
着色器(Shader):
-
Texturing & Lighting:对每个片段应用纹理和光照计算,包括:
- Ambient & Diffuse:环境光和漫反射光照。
- Specular:镜面反射光照。
-
Blending (aggregate across K):将多个片段进行混合,生成最终的图像:
- Sigmoid Silhouette:使用 Sigmoid 函数处理轮廓。
- Softmax RGB:对 RGB 颜色进行 Softmax 处理,得到最终的颜色输出。
-
Gaussian Rendering¶
//todo 这块没懂
3D Prediction¶
Predict Volumetric 3D¶
我们的目标是通过单张2D的图片去建立3D representation of the underlying world
最简单的想法就是找到一个满足这个视角的图片的3D representation,但是这会导致其他视角or实际的3D representation不合理,因为一个2D的视角会带来很多解
我们需要通过[image, 3D]的数据集去训练,训练获取一个比较好的预测结果
我理解的过程是:
- 2D decoder
- 3D encoder
- 把encode出来的每个体素的probability变成binary
隐式解码器会带来更好的预测效果
Predict Point Clouds¶
在这里loss的定义为predicted point距离最近的参考点之间的距离,比单纯的p和参考binary的{0,1}方差更好(我猜是和point cloud的性质有关,不太好作单个单位的分割)
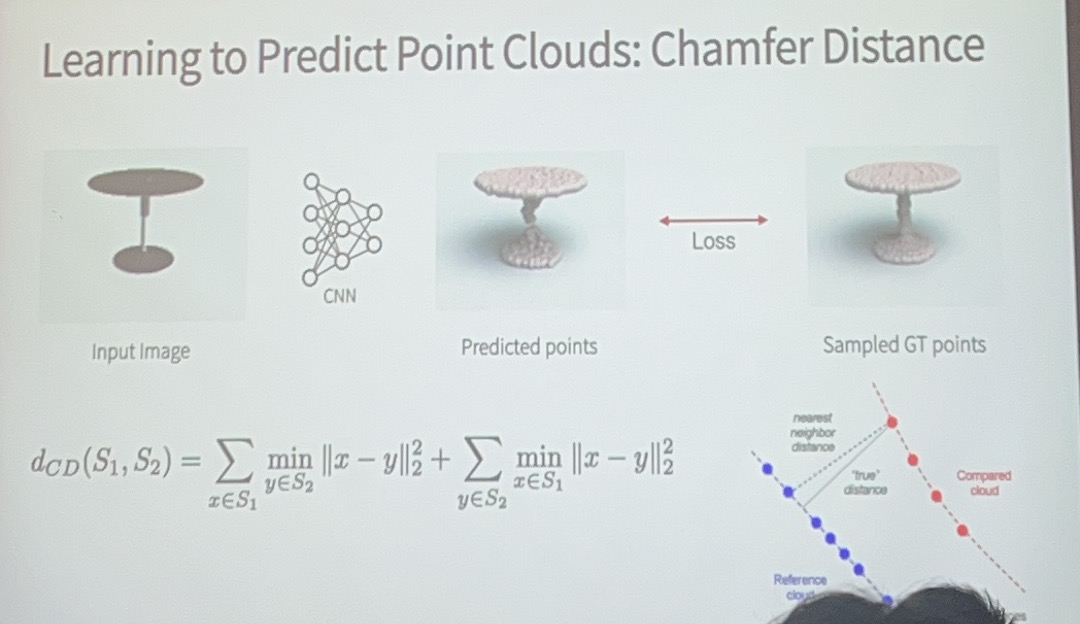
parametrically point clouds - 预测的点数量是固定的,一个2D图片的点的特征对应了一组固定的3D点
Predict Mesh¶
一般是从一个固定的mesh开始通过改变点的位置去deform实现prediction的。
Modelling Uncertainty¶
上面的预测我们都是给出了一个固定的预测,但是我们一张图片不可能包含所有的信息,需要对某些不确定的地方作处理。
Modelling Distributions over 3D¶
//todo